Sidebar
Upload failed. Maybe wrong permissions?
adrl:people:tboaventura
Table of Contents
 | Dr. Thiago Boaventura tboaventura (at) ethz (dot) ch | ||
My name is Thiago Boaventura, and I'm a postdoctoral researcher at the Agile & Dexterous Robotics Lab (ADRL) since June/2013. Bellow you'll find more information about myself, my research, and links to some of my publications.
Background
My main background lies on Control Engineering and Fluid Power Systems. I received my B.Sc and M.Sc degrees in Control and Automation Engineering from the Federal University of Santa Catarina (UFSC), Brazil, in 2009. In 2013 I obtained my PhD degree in Robotics at the Dynamic Legged Systems (DLS) Lab at the Advanced Robotics Department of the Italian Institute of Technology (IIT) (DLS web page). My PhD was focused mainly on the low-level model-based impedance control of the hydraulically-actuated quadruped robot HyQ. The high performance achieved with this controller allowed us to make the robot actively compliant (it's compliant with no springs!) and to use many advanced high-level control techniques, such as Rigid Body Inverse Dynamic, Virtual Model Control, and path planning and balance algorithms. For more details on the HyQ low-level controllers, click here.

At ADRL my core duty is to lead the research related to the European FP7 Project BALANCE in our lab. The overall goal of the project is to realize an exoskeleton that improves the balance performance of humans while standing and walking. While big part of the project effort focuses on increasing the understanding on how human postural control is structured, we focus on using this knowledge to guide the development of human collaborative controls for the exoskeleton robot. The two main control modes are: 1) transparent (passive): under non critical balance situations, the exoskeleton should not apply any force to the wearer; and 2) active: when the exoskeleton detects an imminent balance loss, it reacts by applying torques to the human joints or even moving the user leg to more appropriate positions in order to keep balance.
My research interests include impedance and admittance control, model-based control, legged robotics, passivity of sample-based systems, miniature hydraulic actuators and systems, wearable robotics, and additive manufacturing.
Research
Hydraulics & Robotics
Many of the high-performance robots built to date employ hydraulic actuation. Examples such as BigDog, LS3, HyQ, and Atlas have demonstrated the potential of this actuation technology. Hydraulics has many properties that make it an ideal choice for highly dynamic articulated robot applications:
- Higher power-to-weight ratio;
- The centralized power source (pump + tank) can provide power for several actuators. This permits to distribute better the actuation weight, keeping the robot base heavier and the links lighter;
- The hydraulic transmission, characterized by the fluid, is stiffer than electric drives transmissions (e.g. gear box), resulting in the possibility to have higher closed-loop gains, greater accuracy, and better frequency response;
- Hydraulic actuators are mechanically very simple and allow for robust design against impacts and overload. This is very important in dynamic applications, where high peak forces on the robot structure cannot be avoided and are even part of the requirements
- Hydraulic actuators (e.g. valves) guarantee high enough actuator bandwidth to achieve near perfect torque control in the spectrum of interest for dynamic locomotion of medium to large scale robots. This provides legged robots, such as HyQ, the compliance needed for legged locomotion by using a naturally very stiff actuation system;
- The hydraulic fluid serves also as coolant of the actuators.


Figure 1: HyQ hydraulic actuator unit, on the left. The valve manifold is mounted on the cylinder body to reduce the pipe line length. On the right, HyQ Blue at ADRL.
Hydraulic force/torque control
Being able to apply precise joint torques to a robot has many advantages. Torque control allows various forms of impedance control, control of contact forces, virtual model control, as well as model-based controls, such as rigid body dynamics based control (inverse dynamics, gravity compensation), and operational space control.
The key aspects for achieving high-performance torque control with a hydraulic system are:
- To use servovalves with high flow control bandwidth: HyQ uses high-spec valves from Moog (Fig. 1, left), with bandwidth of about 250 Hz (for ± 25% opening), which are able to exploit the naturally high stiffness of hydraulics;
- To improve the controller using model-based control: HyQ employs model-based control approaches such as load velocity compensation and feedback linearization.
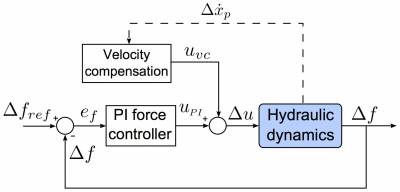
A simple model-based approach for improving torque tracking capabilities is the load velocity compensation (click here to see the paper). In hydraulics, to compensate for the load velocity is equivalent to feed forward an extra flow command such that the pressures in the cylinder chambers are kept constant while the cylinder rod is moving. In this case, the feedback force controller has to only supply only additional small flow commands to adjust the pressure difference between the chambers to reach the desired force. This load motion compensation permits to significantly improve the torque response.
A more complex model-based control consists in linearizing the force dynamics by using the control approach feedback linearization. This approach, besides compensating for the load velocity influence, also compensates for the nonlinear pressure-flow characteristics.
Hydraulic cascade impedance control
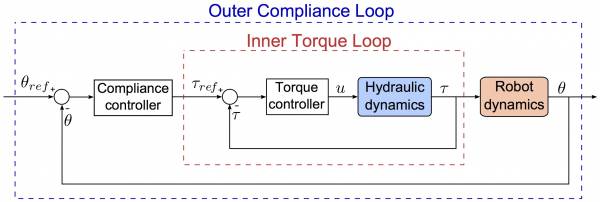
HyQ's legs employ an impedance control scheme composed of two different closed-loop controllers: an outer position loop and an inner torque loop, as described in Fig. 3. These controllers are set in cascade, where the output of the compliance controller manipulates the set-point of the torque controller. The 'Compliance controller' block, shown in Fig. 3, is composed of a PD position feedback controller together with a feedforward inverse dynamics controller.
The video bellow summarizes the results we obtained with the torque-controlled HyQ leg:
- Friction and gravity compensation;
- Great tracking at 5 Hz sinusoidal position reference;
- Active compliance for safe human-robot interactions;
- Drop tests.
Publications
PhD Dissertation
T. Boaventura, “Hydraulic compliance control of the quadruped robot HyQ,” Ph.D. dissertation, Istituto Italiano di Tecnologia and Univerty of Genoa, Italy, 2013 [full thesis]
Selected Journal Publications
T. Boaventura, J. Buchli, C. Semini, and D. G. Caldwell, “Model-based hydraulic impedance control for dynamic robots,” Robotics, IEEE Transactions on, vol. 31, no. 6, pp. 1324–1336, Dec 2015 [preprint]
C. Semini, V. Barasuol, T. Boaventura, M. Frigerio, D. G. Caldwell, and J. Buchli, “Towards versatile legged robots through active impedance control,” International Journal of Robotics Research (IJRR), 2014 [preprint]
H. Dallali, G. Medrano-Cerda, M. Focchi, T. Boaventura, M. Frigerio, C. Semini, J. Buchli, and D. G. Caldwell, “On use of positive feedback for improved torque control,” Journal of Control Theory and Applications, 2014 [To appear]
M. Focchi, G. A. Medrano-Cerda, T. Boaventura, M. Frigerio, C. Semini, J. Buchli, and D. G. Caldwell, “Robot impedance control and passivity analysis with inner torque and velocity feedback loops,” Journal of Control Theory and Applications, 2014 [To appear] [preprint]
Selected Conference Publications
T. Boaventura and J. Buchli, “Acceleration-based transparency control framework for wearable robots,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct 2016, pp. 5683–5688 [full article]
T. Boaventura, G. A. Medrano-Cerda, C. Semini, J. Buchli, and D. G. Caldwell, “Stability and performance of the compliance controller of the quadruped robot hyq,” in Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on, 2013 [full article]
C. Semini, V. Barasuol, T. Boaventura, M. Frigerio, and J. Buchli, “Is active impedance the key to a breakthrough for legged robots?” in International Symposium of Robotics Research (ISRR), 2013 [full article]
T. Boaventura, M. Focchi, M. Frigerio, J. Buchli, C. Semini, G. Medrano-Cerda, and D. Caldwell, “On the role of load motion compensation in high-performance force control,” in Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on, oct. 2012, pp. 4066 –4071 [full article]
T. Boaventura, C. Semini, J. Buchli, M. Frigerio, M. Focchi, and D. G. Caldwell, “Dynamic torque control of a hydraulic quadruped robot,” in IEEE International Conference in Robotics and Automation (ICRA), 2012, pp. 1889–1894 [full article]
M. Focchi, T. Boaventura, C. Semini, M. Frigerio, J. Buchli, and D. G. Caldwell, “Torque-control based compliant actuation of a quadruped robot,” in Proc. of the 12th IEEE Int. Workshop on Advanced Motion Control (AMC), 2012 [full article]
S. Peng, D. T. Branson, E. Guglielmino, T. Boaventura, and D. G. Caldwell, “Performance assessment of digital hydraulics in a quadruped robot leg,” in Proceedings of the 11th Biennial Conference on Engineering Systems design and Analysis (ESDA11), 2012 [full article]
T. Boaventura, C. Semini, E. Guglielmino, V. J. De Negri, Y. Yang, and D. G. Caldwell, “Gain scheduling control for the hydraulic actuation of the hyq robot leg,” in ABCM Symposium Series in Mechatronics, Rio de Janeiro, RJ, Brazil, 2010, vol. 4, pp. 673 – 682, iSBN 978-85-85769-47-5 [full article]
M. Focchi, E. Guglielmino, C. Semini, T. Boaventura, Y. Yang, and D. G. Caldwell, “Control of a hydraulically-actuated quadruped robot leg,” in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2010 [full article]
Y. Yang, E. Guglielmino, J. S. Dai, T. Boaventura, and D. G. Caldwell, “Modeling of a novel 3-way rotary type electro-hydraulic valve,” in Proc. IEEE Int Information and Automation (ICIA) Conf, 2010, pp. 1463–1468 [full article]
CV
CV_ThiagoBoaventura (PDF) 
adrl/people/tboaventura.txt · Last modified: 2018/08/22 11:46 by jonas
Page Tools
Except where otherwise noted, content on this wiki is licensed under the following license: CC Attribution-Share Alike 4.0 International
